Estimating Normals from Pointclouds
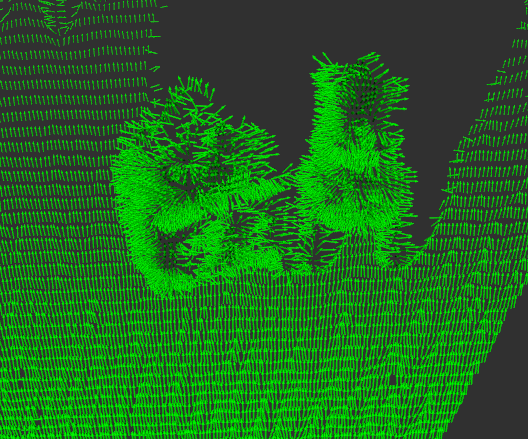
I’m working on using Realsense D435 cameras to estimate a 3D scene. To do this, I implemented Chapter 5 of the Robot Manipulation course. This will be useful for using robot arms to find the best grasps available. This is done by looking for two normals that are both A, pointing in opposite directions and B, colinear. This is explained well by equations 2.6-2.8 in the paper Finding Antipodal Point Grasps on Irregularly Shaped Objects.